Training
![]()
In this section, we provide examples about how to use common RL frameworks to train autonomous driving policy.
stable-baselines3
stable-baselines3 is a lightweight RL training framework, providing most of the commonly used algorithms. It is easy to use on desktop PC, personal laptops, and single node servers. To run the following mini example, let’s install the stable-baselines3 and dependencies at first.
%pip install stable-baselines3[extra]
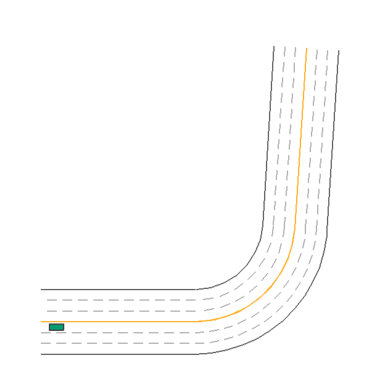
Training a driving agent with stable-baselines3 is easy and straightforward. In the following example, we train an agent to drive in about 5 minutes. Let’s create a simple environment.
from metadrive.envs import MetaDriveEnv
from metadrive.policy.lange_change_policy import LaneChangePolicy
import matplotlib.pyplot as plt
from stable_baselines3.common.monitor import Monitor
from metadrive.component.map.base_map import BaseMap
from metadrive.utils.doc_utils import generate_gif
from IPython.display import Image
def create_env(need_monitor=False):
env = MetaDriveEnv(dict(map="C",
# This policy setting simplifies the task
discrete_action=True,
discrete_throttle_dim=3,
discrete_steering_dim=3,
horizon=500,
# scenario setting
random_spawn_lane_index=False,
num_scenarios=1,
start_seed=5,
traffic_density=0,
accident_prob=0,
log_level=50))
if need_monitor:
env = Monitor(env)
return env
env=create_env()
env.reset()
ret = env.render(mode="topdown",
window=False,
screen_size=(600, 600),
camera_position=(50, 50))
env.close()
plt.axis("off")
plt.imshow(ret)
<matplotlib.image.AxesImage at 0x7f923e770bd0>
After defining the env creation function, we can use the SubProcVecEnv to launch several MetaDrive instances and train the driving agent with PPO.
import gymnasium as gym
from stable_baselines3 import PPO
from stable_baselines3.common.vec_env.subproc_vec_env import SubprocVecEnv
from stable_baselines3.common.utils import set_random_seed
from functools import partial
from IPython.display import clear_output
import os
set_random_seed(0)
# 4 subprocess to rollout
train_env=SubprocVecEnv([partial(create_env, True) for _ in range(4)])
model = PPO("MlpPolicy",
train_env,
n_steps=4096,
verbose=1)
model.learn(total_timesteps=1000 if os.getenv('TEST_DOC') else 300_000,
log_interval=4)
clear_output()
print("Training is finished! Generate gif ...")
# evaluation
total_reward = 0
env=create_env()
obs, _ = env.reset()
try:
for i in range(1000):
action, _states = model.predict(obs, deterministic=True)
obs, reward, done, _, info = env.step(action)
total_reward += reward
ret = env.render(mode="topdown",
screen_record=True,
window=False,
screen_size=(600, 600),
camera_position=(50, 50))
if done:
print("episode_reward", total_reward)
break
env.top_down_renderer.generate_gif()
finally:
env.close()
print("gif generation is finished ...")
Training is finished! Generate gif ...
episode_reward 168.7058092369063
gif generation is finished ...
Image(open("demo.gif", 'rb').read())
ray/rllib
We provide a script demonstrating how to use RLLib>=2.2.0 to train generalizable RL agents:
# Make sure current folder does not have a sub-folder named metadrive
python -m metadrive.examples.train_generalization_experiment
# You can also use GPUs and customized experiment name:
python -m metadrive.examples.train_generalization_experiment \
--exp-name CUSTOMIZED_EXP_NAME \
--num-gpus HOW_MANY_GPUS_IN_THIS_MACHINES
In this example, we leave the training hyper-parameter config["num_envs_per_worker"] = 1 as default, so that each process (ray worker) will only contain one MetaDrive instance.
We further set the evaluation workers config["evaluation_num_workers"] = 5, so that the test set environments are hosted in separated processes.
By utilizing the feature of RLLib, we avoid the issue of multiple MetaDrive instances in single process.
We welcome more examples using MetaDrive in different context! Please show off your code if you like to share it by opening new issue! Thanks!