Draw 3D Lines and Point
![]() s
s
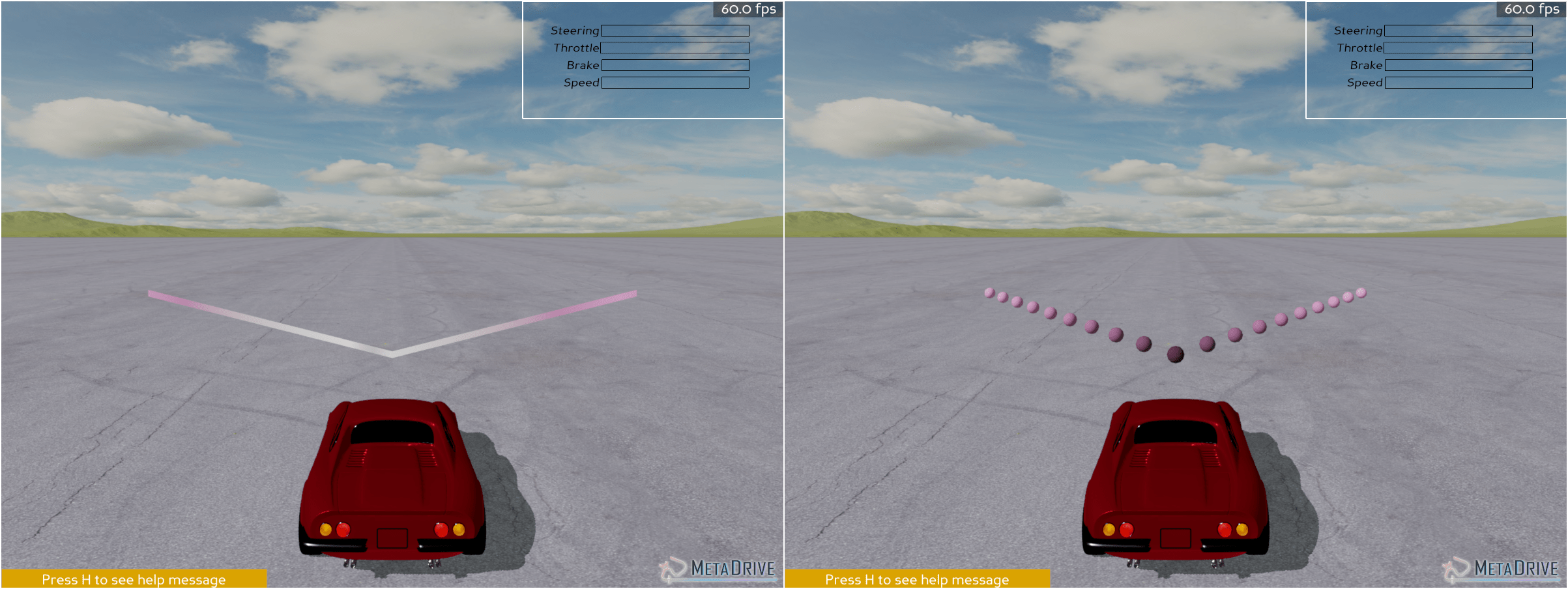
We usually draw points and lines in the 3D world to debug when developing new features and fixing bugs. There are two types of visualization tools can be used: line and point. In this section, we will show how to use these tools. First of all, let’s make an environment and define the tool function which returns a set of points representing a straight line and the color for each point. The points gradually become pink with the distance increasing.
from metadrive.envs.base_env import BaseEnv
import numpy as np
import os
render = not os.getenv('TEST_DOC')
# Define a tool function.
def make_line(x_offset, height, y_dir=1, color=(1,105/255,180/255)):
points = [(x_offset+x,x*y_dir,height*x/10+height) for x in range(10)]
colors = [np.clip(np.array([*color,1])*(i+1)/11, 0., 1.0) for i in range(10)]
if y_dir<0:
points = points[::-1]
colors = colors[::-1]
return points, colors
# create environment
env = BaseEnv(dict(use_render=render))
Lines
The API we are using takes a list of lines as input. A line is represented by a list of points. Thus we create two lines in the following script and draw them in the scene. Also, colors can be specified for each point.
line_1, color_1 = make_line(6, 0.5, 1) # define line 1 for test
line_2, color_2 = make_line(6, 0.5, -1) # define line 2 for test
lines = [line_1, line_2]
colors = [color_1, color_2]
env.reset() # launch the simulation
try:
drawer = env.engine.make_line_drawer(thickness=5) # create a line drawer
drawer.draw_lines(lines, colors) # draw lines
for i in range(100):
env.step([0,0])
finally:
env.close()
A drawer can draw as many lines as possible, but sometimes you may want to clear previous lines and recreate new ones. In this case, you can use drawer.reset() to clear previous lines. The following code shows an example, where every step the lines to draw are updated.
env.reset() # launch the simulation
try:
drawer = env.engine.make_line_drawer(thickness=5) # create a line drawer
for i in range(100):
# draw different lines every step
line_1, color_1 = make_line(6, 0.5, 0.01*i) # define line 1 for test
line_2, color_2 = make_line(6, 0.5, -0.01*i) # define line 2 for test
lines = [line_1, line_2]
colors = [color_1, color_2]
drawer.reset()
drawer.draw_lines(lines, colors) # draw lines
env.step([0,0])
finally:
env.close()
By default, the drawer drawing lines in the world coordinates. It is also allowed to draw lines in objects’ local coordinates. In the following example, you will see that the two lines moves with the vehicle. Note: there is a bug that when the drawer is set in vehicle coordinates the color parameter is invalid. Thus the line color is white in this example.
env.reset() # launch the simulation
try:
drawer = env.engine.make_line_drawer(env.agent.origin, thickness=5)
# rotate the drawer by 90 degree, as +x is at the right side of the car.
drawer.setH(90)
for i in range(100):
# draw different lines every step
line_1, color_1 = make_line(6, 0.5, 0.01*i) # define line 1 for test
line_2, color_2 = make_line(6, 0.5, -0.01*i) # define line 2 for test
lines = [line_1, line_2]
colors = [color_1, color_2]
drawer.reset()
drawer.draw_lines(lines, colors) # draw lines
env.step([0.1,0.5])
finally:
env.close()
Points
MetaDrive also provides point drawer to visualize a set of points. The usage of this function is almost the same as the line drawer. The following example creates a point drawer and update the point positions every frame.
env.reset() # launch the simulation
try:
drawer = env.engine.make_point_drawer(scale=1) # create a point drawer
for i in range(100):
# draw different lines every step
line_1, color_1 = make_line(6, 0.5, 0.01*i) # define line 1 for test
line_2, color_2 = make_line(6, 0.5, -0.01*i) # define line 2 for test
points = line_1 + line_2 # create point list
colors = color_1+ color_2
drawer.reset()
drawer.draw_points(points, colors) # draw points
env.step([0,0])
finally:
env.close()
In addition, the points can work with lines. In the following example, a list of points are visualized with lines, while the other one is visualized with points. Besides, we cancel the reset to keep previous drawn points and lines.
env.reset() # launch the simulation
try:
point_drawer = env.engine.make_point_drawer(scale=1) # create a point drawer
line_drawer = env.engine.make_line_drawer(thickness=5) # create a line drawer
for i in range(100):
if i%5==0:
# draw different lines every step
line_1, color_1 = make_line(6, 0.5, 0.01*i) # define line 1 for test
line_2, color_2 = make_line(6, 0.5, -0.01*i) # define line 2 for test
points = line_1
point_colors = color_1
lines = [line_2]
line_colors = [color_2]
# drawer.reset()
point_drawer.draw_points(points, point_colors) # draw lines
line_drawer.draw_lines(lines, line_colors)
env.step([0,0])
finally:
env.close()