Simulation
![]()
After going through this section, you will learn to customize an simulation environment with developer APIs. Before this, let’s discuss what a simulation is.
Simulation is the process of creating a model of a real or imagined system and then conducting experiments with this model. The purpose is usually to understand how the system works, to predict its behavior under different conditions, or to develop strategies for its operation. This is akin to creating a miniature, controllable version of a complex system in a virtual or conceptual space, where you can observe, experiment, and understand the outcomes without having to interact with the real system. This approach is invaluable in scenarios where real-world experimentation is impractical, dangerous, or impossible.
— ChatGPT4
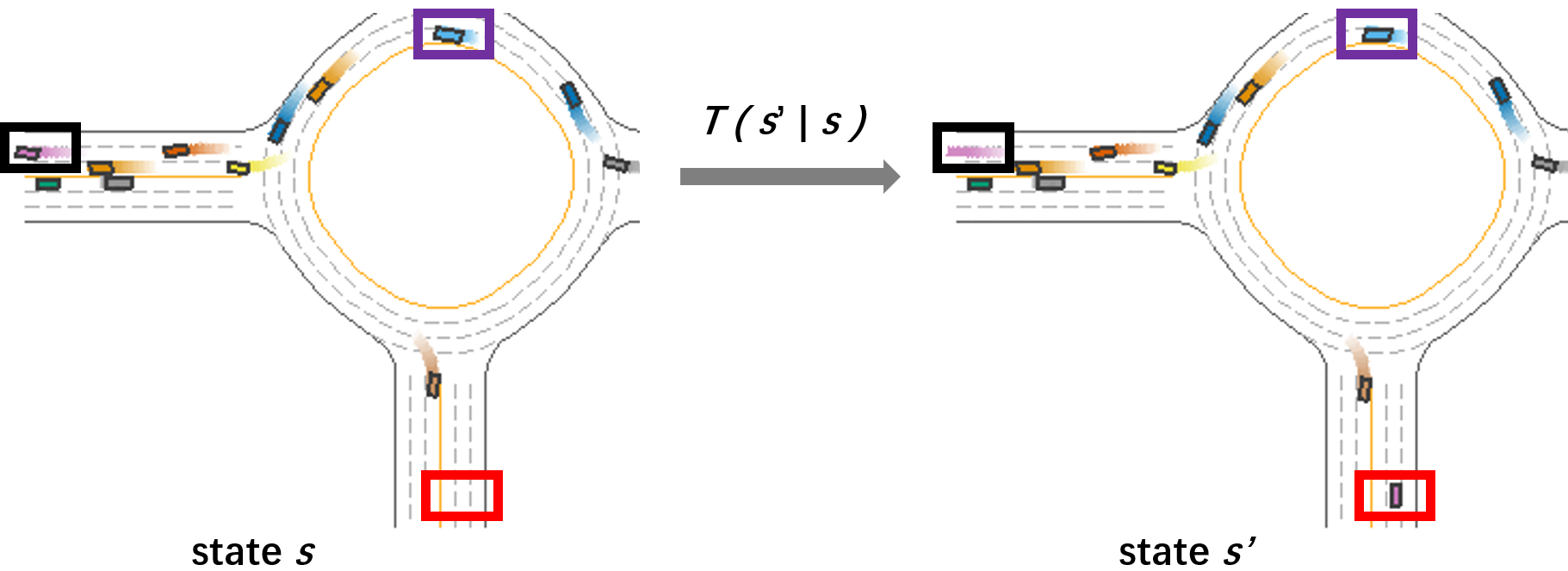
The mathematical definition of simulation is a transition probability function, \(P(s' | s)\), which gives the probability of transitioning to state \(s'\) given current state \(s\). For a deterministic simulation, the transition probability function can be simplified as a transition function \(s' = \mathcal T (s) \). It means the state \(s\) will always be transferred to the state \(s'\). MetaDrive is a deterministic simulator and thus outcomes across repetitive runs will be the same if initial conditions and the random seed are identical. Therefore, MetaDrive is defined with the state space \(S\) and the transition function \(\mathcal T\).
As an autonomous driving simulator, for each state \(s \in S\), it consists of all static objects’ information like the map structure and all dynamic objects’ properties, i.e. positions, headings, velocities, and so on. As the static objects won’t change throughout the whole simulated episode, i.e. map structure, the new state \(s'\) produced by transition function mainly differentiates \(s\) in the following aspects:
properties of existing dynamic objects are updated
properties of new dynamic objects are included if any new dynamic objects are spawned
properties of existing dynamic objects are deleted if any dynamic objects should be recycled
Since the state space is defined and constrained to the 3D physics world, the work remaining for developers to build a driving simulation is to compose the transition function completing the aforementioned three tasks. Concretely, if the openai-gym style APIs are used, the three tasks should happen in the env.step() and be repeated again and again to simulate a driving scene. The following two consecutive frames illustrate the role of transition function in MetaDrive. The cars in black, red, and purple boxes show recycling, spawning, and actuation respectively.
System Design
To understand the mechanism of MetaDrive, let’s first delve into the env.step(). The step() function in all environments is inherited from BaseEnv.step(), which has the following implementation.
from metadrive.utils.doc_utils import print_source
from metadrive.envs.base_env import BaseEnv
print_source(BaseEnv.step)
def step(self, actions: Union[Union[np.ndarray, list], Dict[AnyStr, Union[list, np.ndarray]], int]):
actions = self._preprocess_actions(actions) # preprocess environment input
engine_info = self._step_simulator(actions) # step the simulation
while self.in_stop:
self.engine.taskMgr.step() # pause simulation
return self._get_step_return(actions, engine_info=engine_info) # collect observation, reward, termination
The first line is for preprocessing the actions, which is the external input, while the last line is for collecting observations and passing them outside the environment. Thus the simulator is stepped by _step_simulation and the basic 3 procedures for simulating the driving scene in MetaDrive are as follows.
print_source(BaseEnv._step_simulator)
def _step_simulator(self, actions):
# prepare for stepping the simulation
scene_manager_before_step_infos = self.engine.before_step(actions)
# step all entities and the simulator
self.engine.step(self.config["decision_repeat"])
# update states, if restore from episode data, position and heading will be force set in update_state() function
scene_manager_after_step_infos = self.engine.after_step()
# Note that we use shallow update for info dict in this function! This will accelerate system.
return merge_dicts(
scene_manager_after_step_infos, scene_manager_before_step_infos, allow_new_keys=True, without_copy=True
)
As we use the bullet engine for underlying physics simulation, the self.engine.step() is actually a wrapper for repeatedly executing BulletWorld.doPhysics(dt, 1, dt), where dt is the minimal sub-timestep for integration. A smaller dt produces a more accurate simulation. The doPhysics() is repeated by decision_repeat times and finally, the simulation will forward dt * decision_repeat seconds after calling engine.step(). This period is set to 0.1s by default with dt=0.02 and decision_repeat=5. For example, the vehicle’s speed will be increased to \(5\ m/s\) at state \(s'\) if it has a \(4.9\ m/s\) speed with a \(1m\ /s^2\) acceleration before advancing the simulation.
Before advancing the physics world, there may be some preparations required. For example, if the external input contains signals for controlling a certain vehicle, the steering angles and the throttle value should be set on the target vehicle before stepping it. Thus all these preprocessings are finished by calling self.engine.before_step().
Similarly, through self.engine.after_step(), we can post-process, calculate, and collect some information after advancing the simulation. For example, we usually detect if the vehicle collides with buildings, humans, and other vehicles in the post-processing. In addition, the state update can be finished in the after_step stage as well if these properties are pre-calculated somewhere. For example, if we are replaying vehicle trajectories collected in the real world, we can set the velocity and positions of vehicles in this stage directly. Note: the decision_repeat DOES NOT take effect in engine.before_step and engine.after_step.
If we dive deeper to check the engine.before_step(), engine.step(), and engine.after_step(). We will find that all three functions share the same structure. Take the before_step() function as the example. It sequentially executes mgr.before_step() for each manager.
def before_step(self):
for mgr in managers.values():
# or mgr.step() / mgr.after_step() for engine.step() / engine.after_step(), respectively
mgr.before_step()
In addition, a simulation needs an initial state as the starting point of everything.
This is provided by calling env.reset().
What happens in env.reset() is similar to env.step(): sequentailly calling before_reset(), reset(), after_reset() for all managers.
In a nutshell, the simulation and state transition are controlled and defined by chaining a set of managers. How to execute managers to do simulation is demonstrated in the following flow chart (supposing there are 2 managers in total and the repetition N=config[“decision_repeat”]).
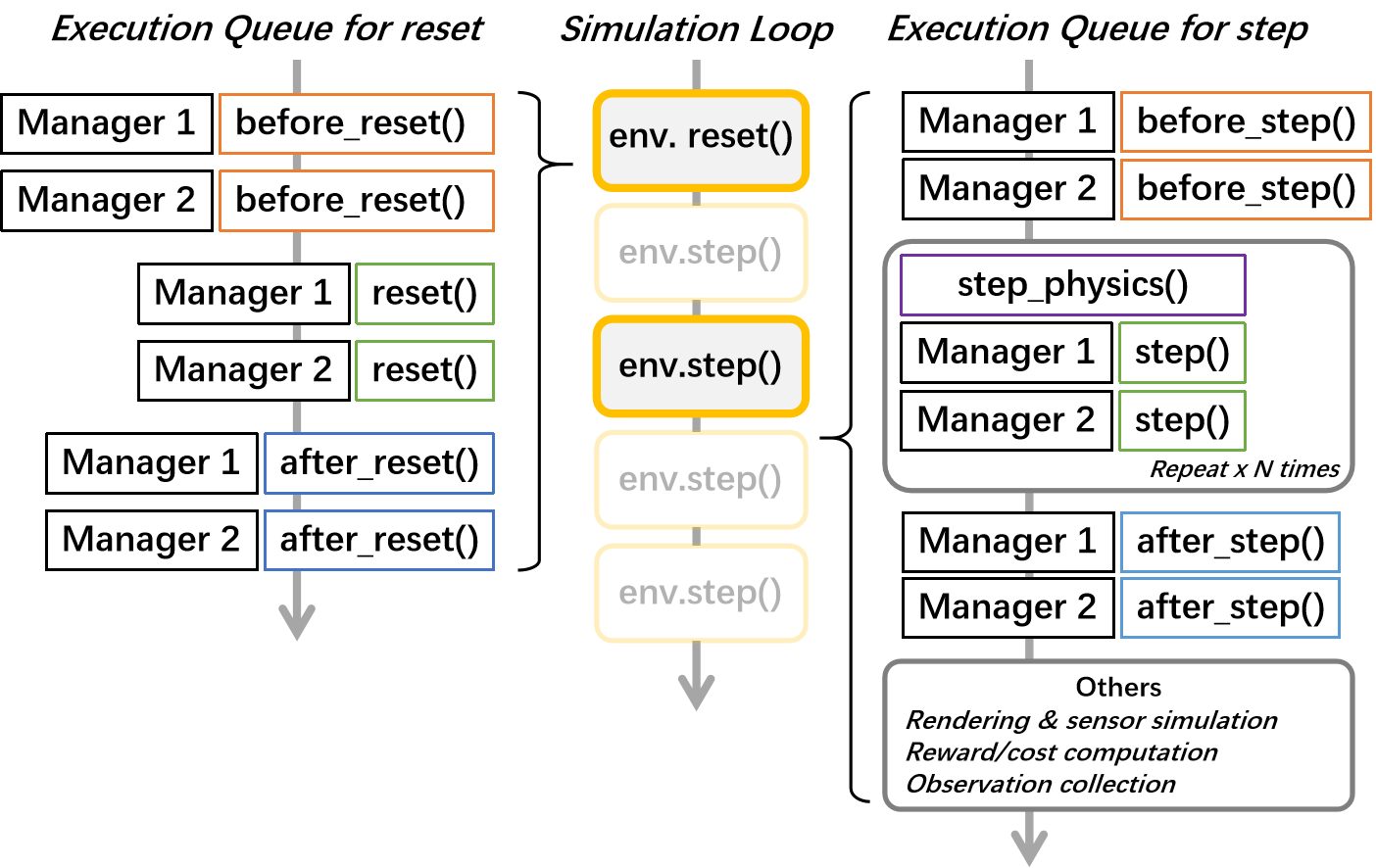
This mechanism lays the foundation for building the simulation. As a developer, building a new environment is actually building a set of managers inherited from BaseManager with several functions overridden.
Manager
The transition function is implemented as a set of managers that concretely defines when to spawn or recycle objects and how to actuate existing objects.
Thus different manager combinations result in different simulation results.
MetaDrive composes different simulation environments by varying the managers, which are plugins essentially.
To make a manager, we need to override the three step-related functions: before_step(), step(), and after_step, and two reset-related functions: before_reset and reset.
After this, we need to register them in env.setup_engine. The registered manager can be accessed by env.engine.managers[manager_id] or env.manager.manager_id.
Step
Let’s discuss the step-related ones. Most of the time, we don’t need to override the step() function as advancing physics is executed by the physics engine already. Only override it when you have a different kinematic/dynamic model for a certain object. For example, if you want to use a customized bicycle model as the kinematics model of a vehicle, you need to put something into the step() function and calculate where the car is going to move given steering, throttle, position, heading, and velocity. Therefore, the key interface to developing a manager is before_step() and after_step().
Let’s create an example to illustrate what we can do with these two developer APIs. In the following example, a vehicle is generated at timestep 40, and recycled at timestep 100. In this period, the vehicle keeps turning left.
from metadrive.envs import MetaDriveEnv
from metadrive.manager import BaseManager
from metadrive.component.vehicle.vehicle_type import DefaultVehicle
from IPython.display import clear_output, Image
class ExampleManager(BaseManager):
def __init__(self):
super(ExampleManager, self).__init__()
self.generated_v = None
self.generate_ts = 40
self.recycle_ts = 100
def before_step(self):
if self.generated_v:
self.generated_v.before_step([0.5, 0.4]) # set action
def after_step(self, *args, **kwargs):
if self.episode_step == self.generate_ts:
self.generated_v = self.spawn_object(DefaultVehicle,
vehicle_config=dict(),
position=(10, 0),
heading=0)
elif self.episode_step == self.recycle_ts:
self.clear_objects([self.generated_v.id])
self.generated_v = None
elif self.generated_v:
self.generated_v.after_step()
class ExampleEnv(MetaDriveEnv):
def setup_engine(self):
super(ExampleEnv, self).setup_engine()
self.engine.register_manager("exp_mgr", ExampleManager())
env = ExampleEnv(dict(map="S"))
try:
env.reset()
for _ in range(120):
env.step([0, 0]) # ego car is static
env.render(mode="topdown",
window=False,
screen_size=(200, 250),
camera_position=(20, 20),
screen_record=True,
text={"Has vehicle": env.engine.managers["exp_mgr"].generated_v is not None,
"Timestep": env.episode_step})
env.top_down_renderer.generate_gif()
finally:
env.close()
clear_output()
Image(open("demo.gif", 'rb').read())
The simulation can be made more complex if we turn the generation rules and recycling rules defined in after_step() into complicated ones including but not limited to:
generate more vehicles
randomly choosing spawn points
randomly selecting vehicle types
recycling objects when they arrive at the destination or a crash happens
assign complex policies to control the spawned objects to increase the automation level
and so on …
Reset
In the previous example, no initialization is executed as we didn’t override the before_reset() and reset() functions.
But these two functions are important if we are going to simulate a set of scenarios instead of one environment.
For switching to a new scenario whenever env.reset() is executed, we need to do two things:
clear objects created in the previous episode, making the scene empty
generate new objects and compose a new scenario
Thus the manager.before_reset() and reset() are for these aims respectively.
Usually, we don’t need to modify the before_reset() and just use the one from the base class.
This is because all objects created by spawn_object() will be recorded in manager.spawned_objects, which will be cleared by BaseManager.before_reset() when initializing a new episode.
Thus users don’t need to manage the object destroy manually.
If we are going to spawn a traffic cone when the scene is created, we can do related operations in ExampleManager.reset(). That’s all!
from metadrive.component.static_object.traffic_object import TrafficCone
class ConeExampleManager(ExampleManager):
def reset(self):
for lateral in range(2, 10, 2):
self.spawn_object(TrafficCone, position=[15, lateral], heading_theta=0)
class ConeExampleEnv(MetaDriveEnv):
def setup_engine(self):
super(ConeExampleEnv, self).setup_engine()
self.engine.register_manager("exp_mgr", ConeExampleManager())
env = ConeExampleEnv(dict(map="S"))
try:
env.reset()
for _ in range(120):
env.step([0, 0]) # ego car is static
env.render(mode="topdown",
window=False,
screen_size=(200, 250),
camera_position=(20, 20),
screen_record=True,
text={"Has vehicle": env.engine.managers["exp_mgr"].generated_v is not None,
"Timestep": env.episode_step})
env.top_down_renderer.generate_gif()
finally:
env.close()
clear_output()
Image(open("demo.gif", 'rb').read())
In practice, we use managers to manage almost everything such as maps, traffic, pedestrians, traffic lights, and so on.
You can find a lot of examples under the directory metadrive/managers.
Priority
When multiple managers work together, it is necessary to determine the execution sequence. It can be decided by the PRIORITY property, which is a class property and needs to be specified when creating your manager. Managers with lower values have higher priorities. The code exemplifies this.
from metadrive.envs import MetaDriveEnv
from metadrive.manager import BaseManager
class Manager1(BaseManager):
PRIORITY = 10
def reset(self):
print("Reset Manager 1")
class Manager2(BaseManager):
PRIORITY = 20
def reset(self):
print("Reset Manager 2")
class CompareEnv(MetaDriveEnv):
def setup_engine(self):
super(CompareEnv, self).setup_engine()
self.engine.register_manager("mgr_1", Manager1())
self.engine.register_manager("mgr_2", Manager2())
env = CompareEnv(dict(map="S", log_level=50))
try:
env.reset()
finally:
env.close()
Reset Manager 1
Reset Manager 2
Some may ask why we need the abstraction: manager. Is it redundant, making the system complex?. Well, if this is a simple car-driving environment like gym car-racing, such an abstraction is indeed not necessary. However, we introduce extra abstraction to increase the system’s extensibility and atomicity. As a result, functionalities are isolated clearly and won’t interfere with each other. The reason is the same as why we separate code into several files and wrap it with classes given that we can actually put all things in a single file with thousands of lines.
Object
As stated before, a manager is responsible for managing the creation, movements, and recycling of objects. In MetaDrive, objects can be simply considered as vehicles, pedestrians, and almost all traffic participants. However, the concept of object can go beyond these concrete entities. A roadblock and a map can be an object as well as long as they are managed by managers.
Existing objects in a manager can be accessed with manager.spawned_objects.
This dictionary allows one to monitor the status of objects created by this manager and access these objects with their ID.
Furthermore, it allows the manager to automatically destroy objects generated in the finished episode when creating a new one.
Three basic operations can be applied to modify or access this dictionary: spawn_object, get_objects, and clear_objects.
Spawn Object
For creating an object, we use the API manager.spawn_object. It takes as input the object class and the parameters required for creating an instance from this class and returns the created instance. The syntax is like:
obj = self.spawn_object(object_class, parameter_1=p_1, parameter_2=p2)
The obj created in this way is the same as:
obj = object_class(parameter_1=p_1, parameter_2=p2)
The reason we use the spawn_object to create object instances is that this function will do some latent optimizations speeding up the object creation.
It also logs the creation data in the record system, so we can replay the spawning behavior when replaying a logged scenario.
In addition, it sets the random_seed for an object to make sure the outcome of a simulation can be reproduced.
It is worth noting that the spawn_object function only accepts keyword arguments to ensure the parameters are specified successfully.
Access Object
Object access can be achieved by the manager.get_objects() API, which will return all objects if no arguments are applied. On the other hand, it can take as input a list of object IDs or a filter and returns objects with specific IDs or satisfying the conditions.
The filter here is a function that takes an object as input and returns a boolean. If get_objects receives a filter as an argument, it will traverse all objects and select those making the filter return True.
Additionally, it is allowed to access the objects with manager.spawned_objects and the target object ID, which is fast and simple when accessing just one object.
The following example shows how to get vehicles in M type.
env = MetaDriveEnv(dict(log_level=50))
env.reset()
filter = lambda x: x.config["vehicle_model"] == "m"
try:
objs = env.engine.traffic_manager.get_objects(filter)
print("The number of M type vehicle: {}".format(len(objs)))
finally:
env.close()
The number of M type vehicle: 6
Clear Object
In one episode, we may want to delete some objects from the scene if it is finished. In this case, the manager.clear_objects() can be used.
Similar to get_objects, it is allowed to destroy a list of objects with certain IDs or meeting specific conditions.
Actually, the object destroyed in this way is still kept in the memory. It is stored in a dead object pool.
When the same type of objects are going to spawn, we can activate them directly, which accelerates the object spawning.
However, users can still set the destory=True to fully remove this object from the memory.
The following example shows how to clear all M-type vehicles managed by the traffic_manager.
env = MetaDriveEnv(dict(log_level=50))
env.reset()
clear_output()
filter = lambda x: x.config["vehicle_model"] == "m"
def print_status():
m_objs = env.engine.traffic_manager.get_objects(filter)
all_objs = env.engine.traffic_manager.get_objects()
print("The number of M type vehicle before clearing: {}".format(len(m_objs)))
print("The number of all vehicle before clearing: {}\n".format(len(all_objs)))
return len(m_objs), len(all_objs)
try:
pre_part, _ = print_status()
# clear objects
env.engine.traffic_manager.clear_objects(filter)
after_part, _ = print_status()
assert after_part == 0 and pre_part > 0
finally:
env.close()
The number of M type vehicle before clearing: 6
The number of all vehicle before clearing: 13
The number of M type vehicle before clearing: 0
The number of all vehicle before clearing: 7
Object APIs in Engine
Actually, the three object APIs are wrappers for engine.spawn_object, engine.get_objects(), and engine.clear_objects().
The difference is the object APIs in the manager additionally modify the manager.spawned_objects.
Therefore, developers can call the engine-based object APIs for managing objects as well.
However, keep in mind that cross-manipulation is prohibited.
Objects created by manager-based object API should be recycled by manager.clear_objects(), while those created by engine.spawn_object must be recycled by engine.clear_objects(). Similarly, objects created by manager 1 can not be recycled by manager 2.
These behaviors will induce bugs.
All generated objects no matter by which manager it is created are recorded in engine._spawned_objects. Thus the engine-based object API will traverse all objects instead of a specific manager-created ones when getting and clearing objects. The engine also has underlying mechanisms to detect and avoid memory leaks like checking if all objects are cleared when creating a new scenario. Despite this, we still recommend using managers to manage your scene, which can be viewed as a “sub-engine” with complex optimization in hiding.
Policy
The policy is usually associated with objects, especially those whose properties need to be changed.
For example, the throttle and steering of a vehicle have to be changed to move toward the destination.
How to change these properties can be determined by policies inherited from BasePolicy with the policy.act() overridden.
Thus calling policy.act() is to make one decision according to the policy.
This function is supposed to return some decisions for an object such as control signals for a vehicle.
Here, we discuss APIs for creating and accessing policies.
For customizing a policy, please refer to Policy Customization.
APIs
A policy can be added for an object through manager.add_policy.
Similar to spawn_object(), typical usage of this API is as follows.
policy = add_policy(object_id, PolicyClass, policy_argument_1, policy_argument_2)
It is the same as
policy = PolicyClass(policy_argument_1, policy_argument_2)
By having the object_id recorded by the engine, we can access the policy of an object everywhere.
A policy for the corresponding object can be accessed by engine.get_policy(object_id) or manager.get_policy(object_id). The latter one is implemented by calling the former one, so these two methods have no difference. Whenever an object is cleared through engine.clear_objects or manager.clear_objects, the policy associated with it will be cleared and destroyed as well.
Example
This example demonstrates how to add a policy for an object generated and managed by a manager. We added an IDMPolicy for the generated object, so it can drive toward the destination.
from metadrive.policy.idm_policy import IDMPolicy
from metadrive.envs import MetaDriveEnv
from metadrive.manager import BaseManager
from metadrive.component.vehicle.vehicle_type import DefaultVehicle
from IPython.display import clear_output, Image
class MovingExampleManager(BaseManager):
def before_step(self):
for id, obj in self.spawned_objects.items():
p = self.get_policy(id)
obj.before_step(p.act()) # set action
def reset(self):
obj = self.spawn_object(DefaultVehicle,
vehicle_config=dict(),
position=(10, 0),
heading=0)
self.add_policy(obj.id, IDMPolicy, obj, self.generate_seed())
def after_step(self, *args, **kwargs):
for obj in self.spawned_objects.values():
obj.after_step()
if self.episode_step == 180:
self.clear_objects(list(self.spawned_objects.keys()))
class MovingExampleEnv(MetaDriveEnv):
def setup_engine(self):
super(MovingExampleEnv, self).setup_engine()
self.engine.update_manager("traffic_manager", MovingExampleManager()) # replace existing traffic manager
env = MovingExampleEnv(dict(map="O"))
try:
env.reset()
for _ in range(200):
env.step([0, 0]) # ego car is static
env.render(mode="topdown",
window=False,
screen_size=(400, 400),
camera_position=(100, 7),
scaling=2,
screen_record=True,
text={"Has vehicle": bool(len(env.engine.traffic_manager.spawned_objects)),
"Timestep": env.episode_step})
assert env
env.top_down_renderer.generate_gif()
finally:
env.close()
clear_output()
Image(open("demo.gif", 'rb').read())
Config
Commonly, we want to have some parameters to adjust the properties of the manager, such as the vehicle generation timestep and recycling timestep in the previous example. Rather than hardcoding them in the class, we can expose them outside, so users can change these properties through the config system. The following code is modified based on the manager example, the differences are marked with annotations.
from metadrive.envs import MetaDriveEnv
from metadrive.manager import BaseManager
from metadrive.component.vehicle.vehicle_type import DefaultVehicle
from IPython.display import clear_output, Image
class ExampleManager(BaseManager):
def __init__(self):
super(ExampleManager, self).__init__()
self.generated_v = None
# ===== Access the parameters in engine.global_config =====
self.generate_ts = self.engine.global_config["generate_timestep"]
self.recycle_ts = self.engine.global_config["recycle_timestep"]
def before_step(self):
if self.generated_v:
self.generated_v.before_step([0.5, 0.4]) # set action
def after_step(self, *args, **kwargs):
if self.episode_step == self.generate_ts:
self.generated_v = self.spawn_object(DefaultVehicle,
vehicle_config=dict(),
position=(10, 0),
heading=0)
elif self.episode_step == self.recycle_ts:
self.clear_objects([self.generated_v.id])
self.generated_v = None
elif self.generated_v:
self.generated_v.after_step()
# ===== This environment has two more configs than the MetaDriveEnv =====
EXAMPLE_ENV_CONFIG = dict(generate_timestep=40,
recycle_timestep=100)
class ExampleEnv(MetaDriveEnv):
# ===== Register them by merging them with the config of MetaDriveEnv
@classmethod
def default_config(cls):
cfg = super(ExampleEnv, cls).default_config()
cfg.update(EXAMPLE_ENV_CONFIG)
return cfg
def setup_engine(self):
super(ExampleEnv, self).setup_engine()
self.engine.update_manager("traffic_manager", ExampleManager())
# ===== Set parameters for ExampleManager =====
env = ExampleEnv(dict(generate_timestep=80,
recycle_timestep=200,
map="S"))
try:
env.reset()
for _ in range(220):
env.step([0, 0]) # ego car is static
env.render(mode="topdown",
window=False,
screen_size=(200, 250),
camera_position=(0, 20),
screen_record=True,
text={"Has vehicle": env.engine.managers["traffic_manager"].generated_v is not None,
"Timestep": env.episode_step})
env.top_down_renderer.generate_gif()
finally:
env.close()
clear_output()
Image(open("demo.gif", 'rb').read())
In this example, we add two parameters into the environment config and access their values in the ExampleManager through engine.global_config.
As in each MetaDrive process, the engine is a global variable and a singleton. Thus we can access it everywhere via metadrive.engine.engine_utils.get_engine().
With the engine, we can access the global_config as well. In this example, the engine is accessed by calling manager.engine, which is actually a wrapper for get_engine().
Moreover, the config acquired by engine.global_config is the same as the env.config. Both of them point to the same config dict instance.
Therefore, with a global config dict, we can access all parameters everywhere, exempting the need for designing the function argument list and passing parameters when creating managers.
from metadrive.engine import get_engine
try:
env.reset()
clear_output()
claim = env.config is env.engine.global_config is get_engine().global_config
assert claim
print(claim)
finally:
env.close()
True
More information about the usage of config system and config lists for specific environment can be found at Configuration.